

Reactive suspension was the starting point and first introduced by the real Lotus Formula One team, when Chapman was still part of it, the basic idea takes its roots back to the ground effect period. It was thought as a way to keep the right ride height constant at any times on the circuit so the grip and aerodynamics would be maximised and this was predominant when talking about the skirts equipped cars.
The roots can be seen in the 1981 Lotus 88 car, yes the “Twin-Chassis” car.
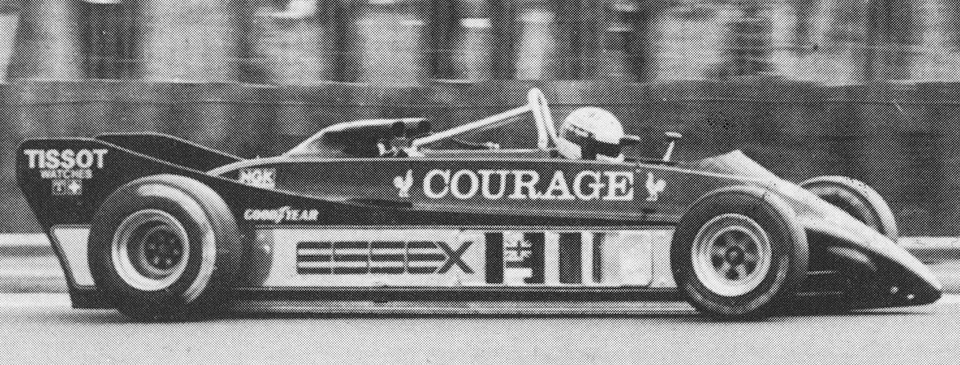
The 88 was design with a real chassis and a second one which would form the exterior bodywork and would act as the skirts and wing altogether. The second would only act as an aerodynamic device and the main one, the tub would actually be in charge of the damping and suspension. The result was that at any speed, the car was generating downforce and that the outer structure, skirts included was levelled constantly, therefore maximizing the efficiency of these. Other unhappy teams pushed for the car to be banned at its first appearance, the San Marino GP in 1981.

Then came what the electronic version, this was first trialed on the Lotus Esprit road car, it proved very difficicult in the early 80’s to make it work. The concept was the same, ensure constant ride height and therefore ensure constant and improved handling. In the competition world, it was first trialed in 1983 on the Lotus 92 at Long Beach with Nigel Mansell driving the car. It proved very difficult as in those days electronics were at their beginnings in the sport and handling them wasn’t easy.
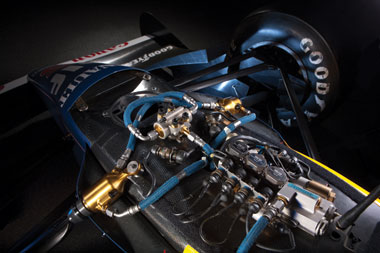
How it worked was simple, sensors on the car would gauge the car while in movement. Suspension or dynamics of the car such as rotational motions such as roll, pitch and yaw as well as translational movements with heave, surge and sway would be monitored through an ECU which controled a hydraulic system. This hydraulic system would work on the dampers like you can see below so all of the above parameters as well as rake would be controlled through the four corners and active adjustment of the suspension in order to counter balance them and ensure optimal ride height, etc. at any time around the circuit.
From 1987, computers and electronics had evolved and the Lotus Honda 99T was introduced. Engineering side was handled by Gerard Ducarouge and he was the man that made it work so it was on for the whole season with Ayrton Senna and Satoru Nakajima driving the cars.
It wasn’t as good as promised, heavy and taking power from the engine, the question on the driver side was : “Is it worth it ?”. The Honda engined Williams were up the front and the Lotus were mid-field. In a certain way it was worth it as Ayrton would go on and win at the bumpy street circuit of Detroit and finish second at Monaco but still it wasn’t yet mastered. It was in those days a heavy and power consuming device but it was being looked at by everybody as electronics aids were becoming a very important part of the sport in those days and there was no better device than this to maximize aerodynamic efficiency.
The technology explained :
Williams was then the other big team who got its hands on and which started getting it right with a better developped system when it won at Monza with Nelson Piquet at the end of the season. Lotus gave-up for the next season but Williams continued even if unliked by its #1 driver Nigel Mansell and before being dropped during the season.
And as evolution meant computers and electronics were getting better and their importance in the sport as well, it all became the true and real active suspension. For the 1991 season, Williams started playing with the suspension again on the FW14. Nigel was still there and still, he didn’t like the device.
When the FW14 “B” version was introduced late in the season, it featured the “Active” Suspension as it was now a programmed system acting alongside the driver and more or less a system reading the track and adapting all of the above dynamics of the car to the track conditions. Tested but not reaching the full potential of the car, Williams concentrated on winter testing with it in order to get it working properly.

1992 saw Williams continue with the FW14 B and the “Active Car” was properly introduced. First race of the season saw the team dominate, taking the two first steps of the podium. Mansell and Patrese set the path for the rest of the season. Domination was the word and other team and drivers, such as McLaren and Senna were not happy. Williams had set the level to a point that no other team was capable to reach. The culminating point of that domination would be Interlagos that year with the Williams qualifying 2.199s ahead of their rivals… Nigel would go on and take the title as well.

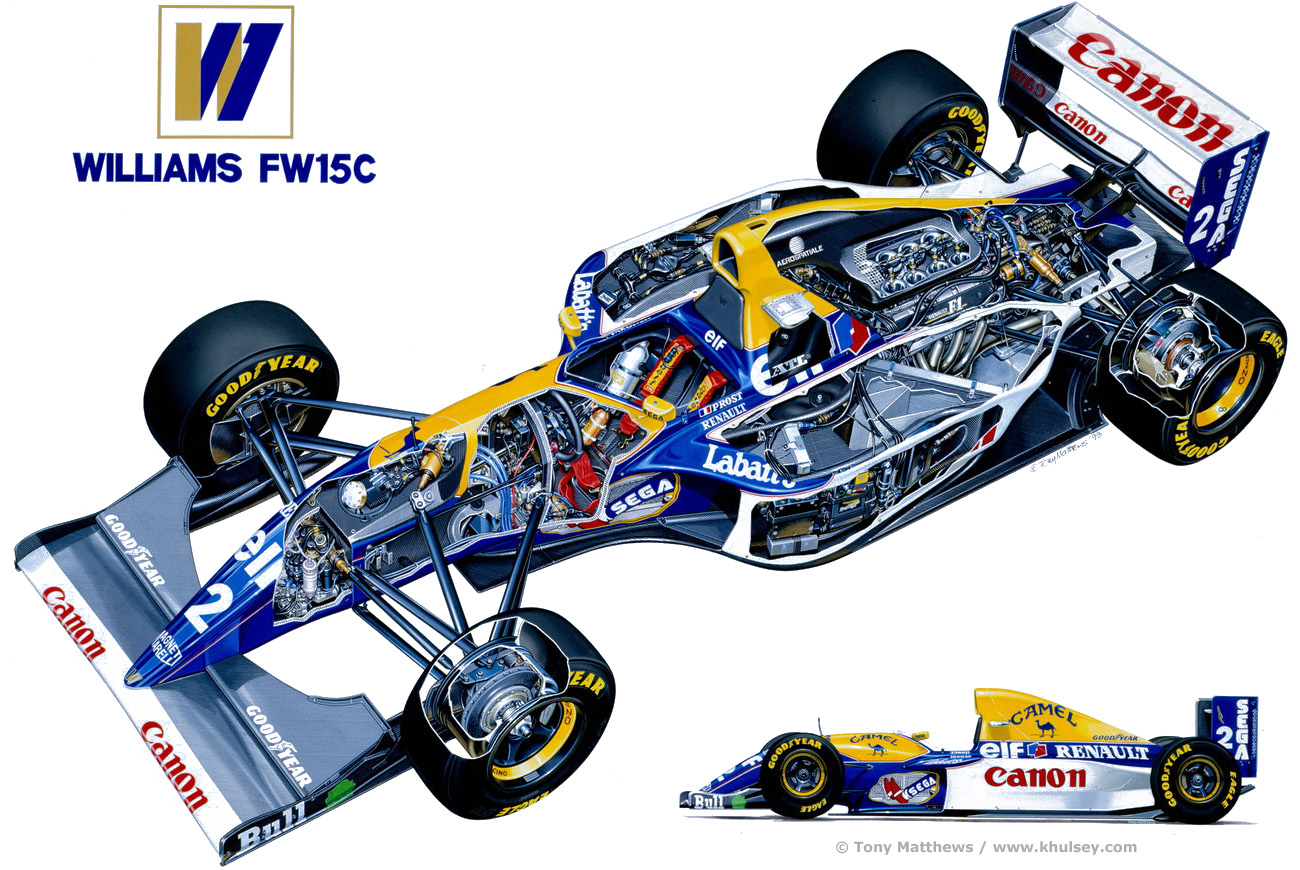
In 1993, the team started with an all new line-up of drivers and the FW15C, Alain Prost and Damon Hill repeated the trend Williams had been setting the season before. Alain would dominate and take the tittle before saying goodbye to Formula 1.
As the cars were getting faster because of the device being adopted by the whole grid, it didn’t take long for the FIA to make a regulation move and it was decided that it would be banned from 1994 alongside a whole lot of other electronic aids. The cars were too fast and relied too much on these.
Quite simple to sum up Active Suspension served two purposes, keep tires in their maximum contact patch with the road under all G-conditions; cornering, braking, and acceleration. Suspension or dynamics of the car such as rotational motions with roll, pitch and yaw as well as translational movements with heave, surge and sway were also counter-balanced in order to achieve optimal aerodynamic efficiency and maximum use of the underfloor.

One thought on “#Tech – From Reactive to Active Suspension.”